March 10, 2019
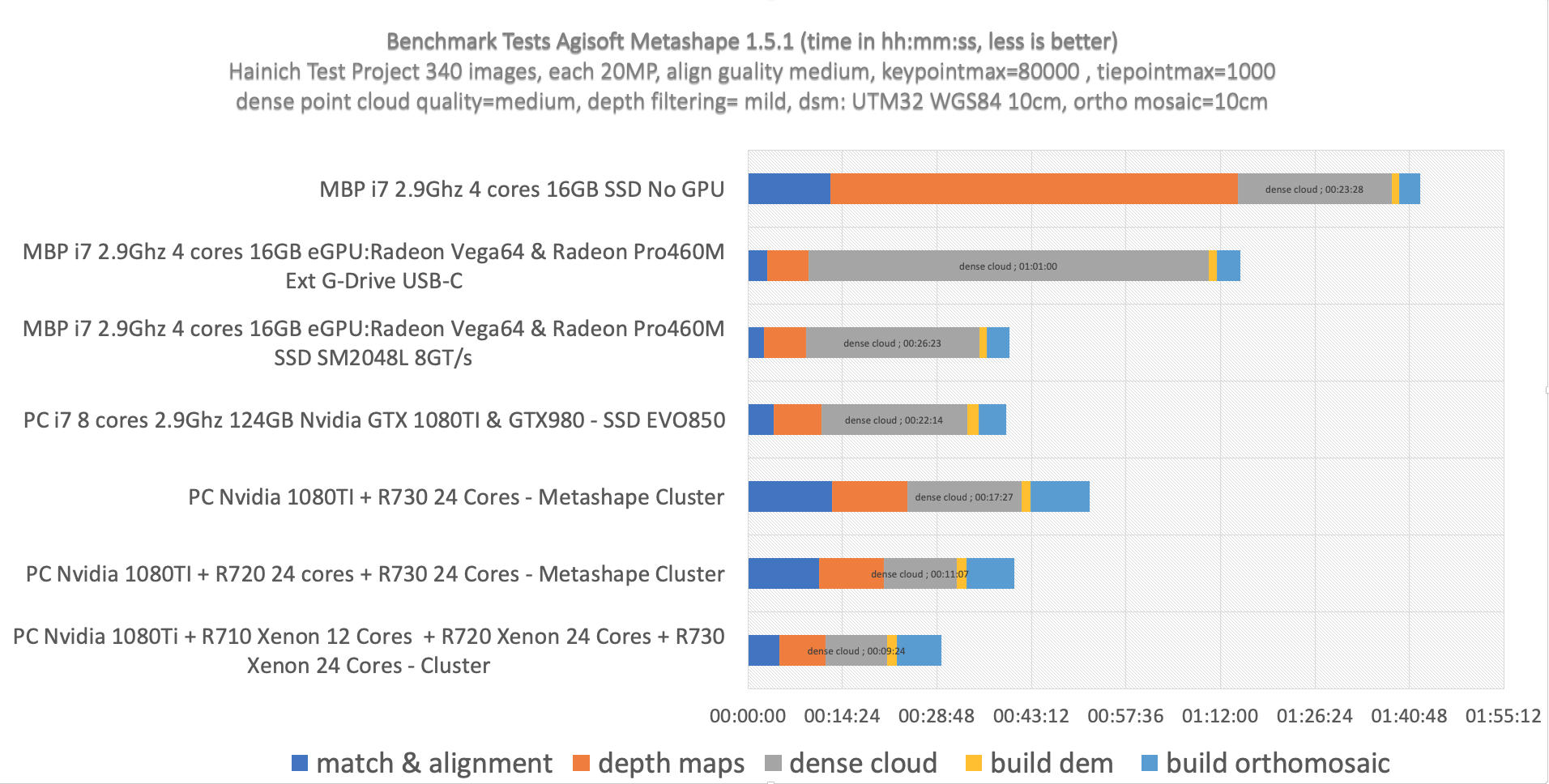
Cluster & Batch Processing in Agisoft Metashape
20 days! – better/faster hardware anyone? Processing large quantities of image files from UAV flight campaigns in Agisoft is sometimes very time consuming and usually should be done in a cluster environment with distributed nodes doing the heavy pixel lifting. Sometimes even a cluster setup can be limiting when the subprocess needs more RAM memory than available on a single...