June 20, 2025
FSU Jena wins the SPSG Park3D Project!
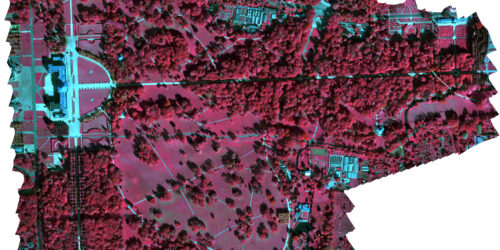
The FSU Jenacopter Labs team wins the Park3D project proposal with SPSG (Stiftung Preußische Schlösser und Gärten). In 2025 and 2026 we will in detail analyze the vitality of the vegetation in the historical park regions Sanssouci and Babelsberg / Potsdam with various copter-based sensors: The P1 (a 35mm full frame 45 Megapixel RGB camera) will be used for detailed...