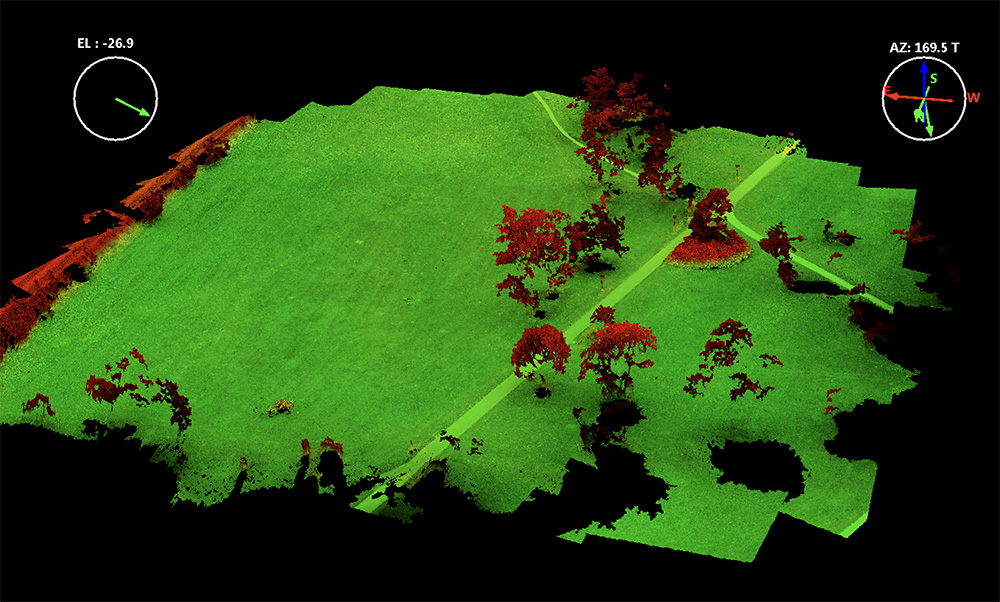
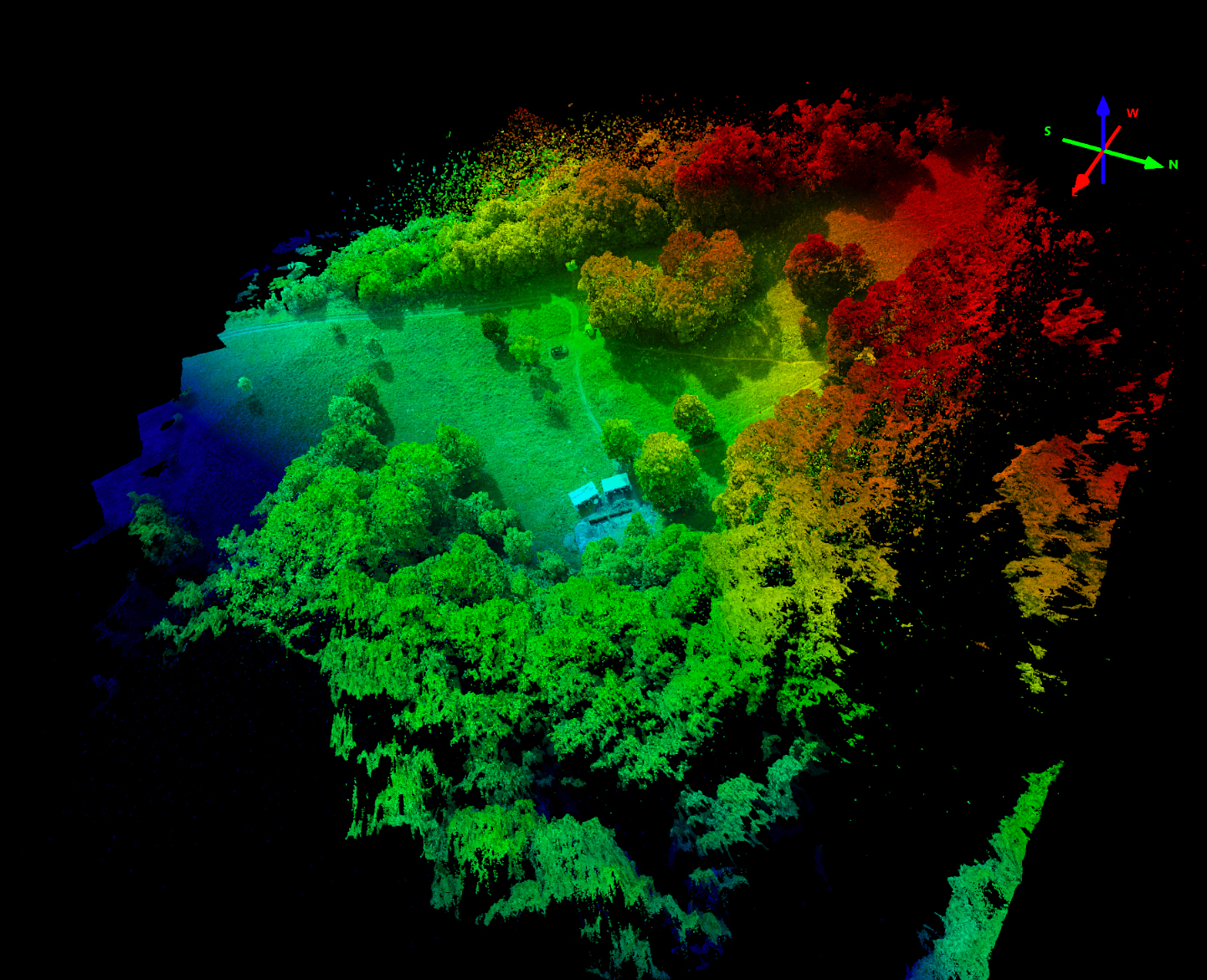
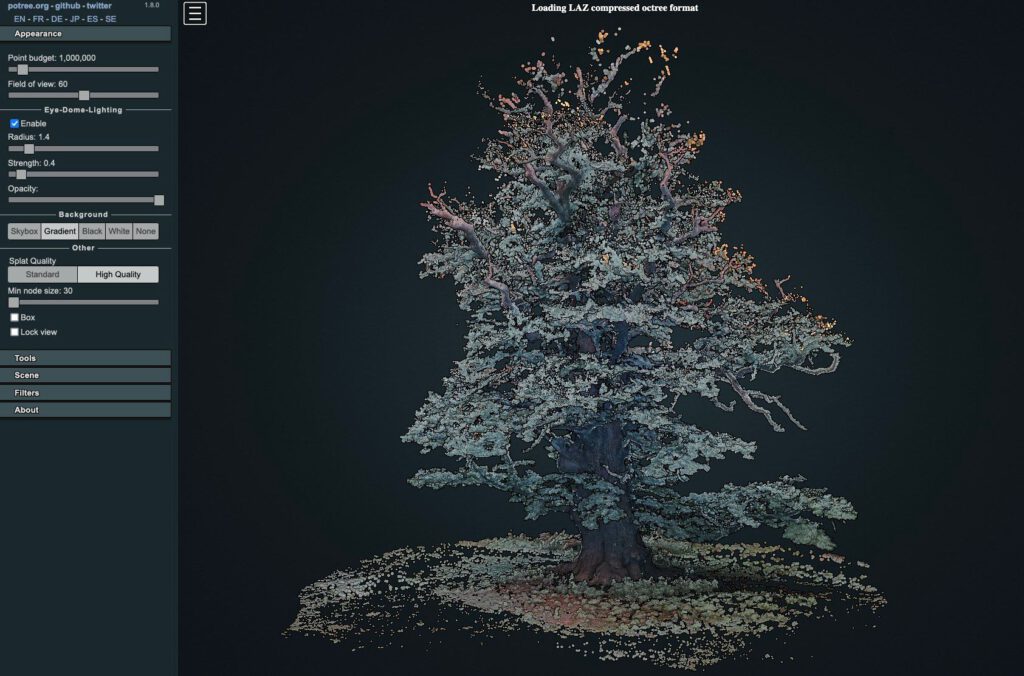
3D point cloud of the 1000 years old Ivenacker Oack Trees
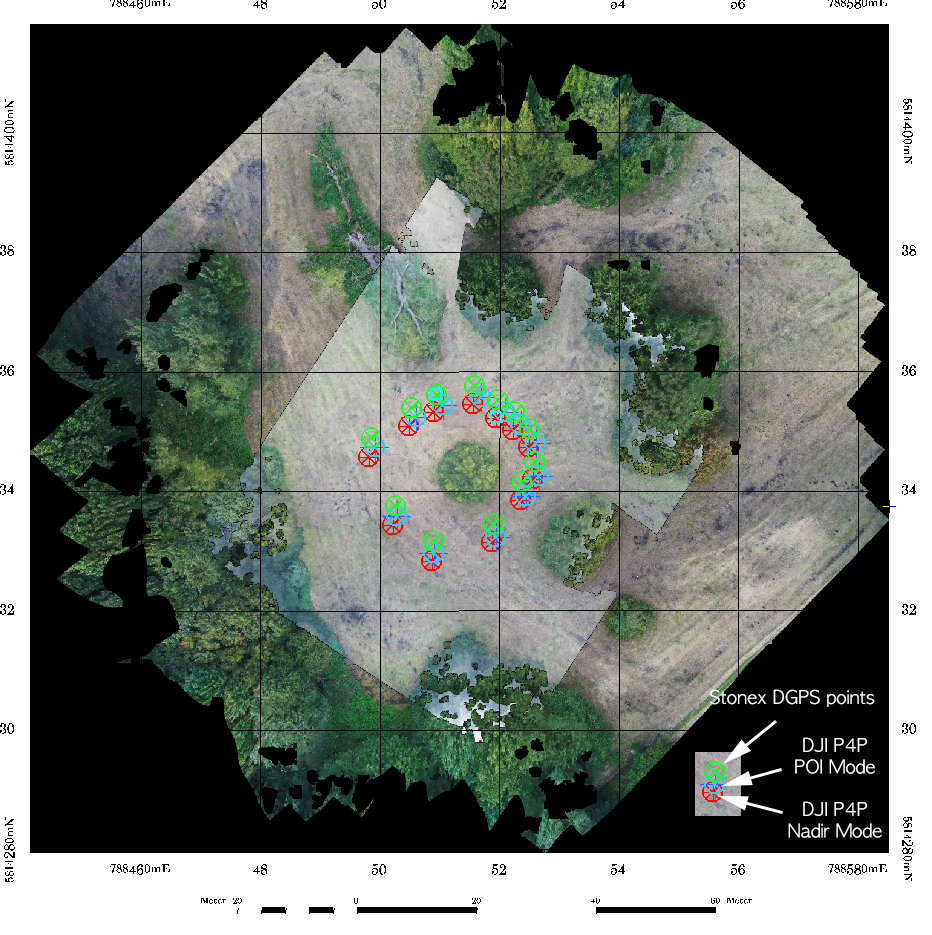
Its always a challenge to work on vegetation point cloud renderings with multi view image matching concepts. In complex 3-dimensional environments and for horizontal image capturing – using a drone is often just not possible. Here horizontal imaging can be an affordable alternative to TLS (Terrestrial Lidar Scanning) systems. Drawback of most OTS consumer electronics camera systems is the missing precise DGPS position measurement – in consequence the georeferencing of the 3D model is usually missing or has to be calculated from ground reference points that where precisely measured with a DGPS device in advance.
This work was done with a Near Infrared converted Nikon D800 and shot from the ground. The Ivenacker oack trees are complex 3-dimensional objects and precise mapping is difficult without georeferenced points. However this approach shows that the overall estimation of the 3d shape is successful – although accuracy and relative object shape accuracy was not validated.
Access to the full POI circle was partly prohibited. 403 images were captured and aligned in Metashape 1.8.3 using Alignment Settings “High” and keypoint limit of 80k and tiepoint limit of 4000, depth map calculation was done with full quality jpegs (ultra high setting) and mild filtering. The dense cloud calculation resulted in 63 mio points after spectral filtering.
A reduced size of the point cloud model is available as an interactive visu online here as a potree converted format: