September 6, 2019
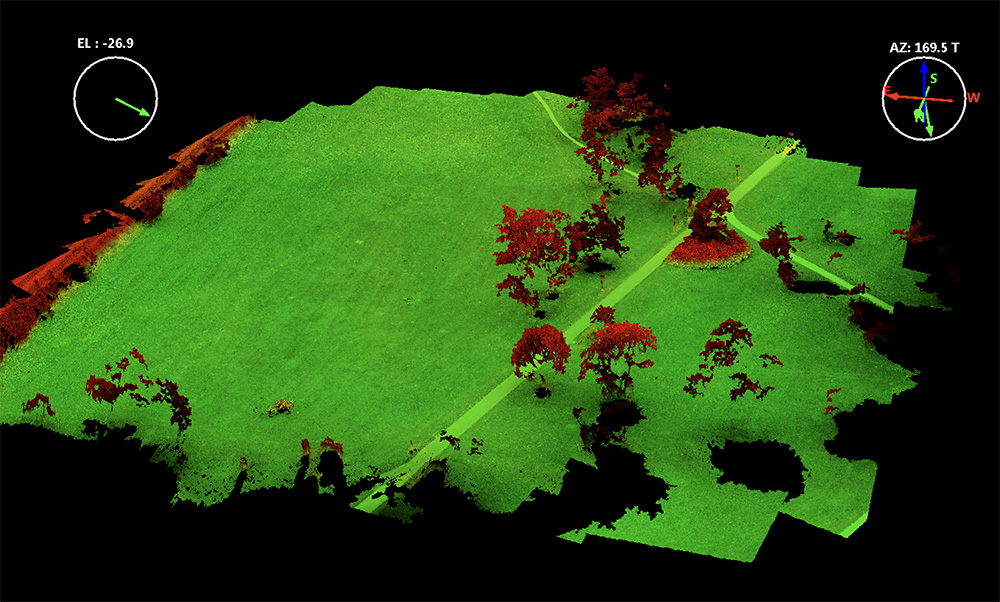
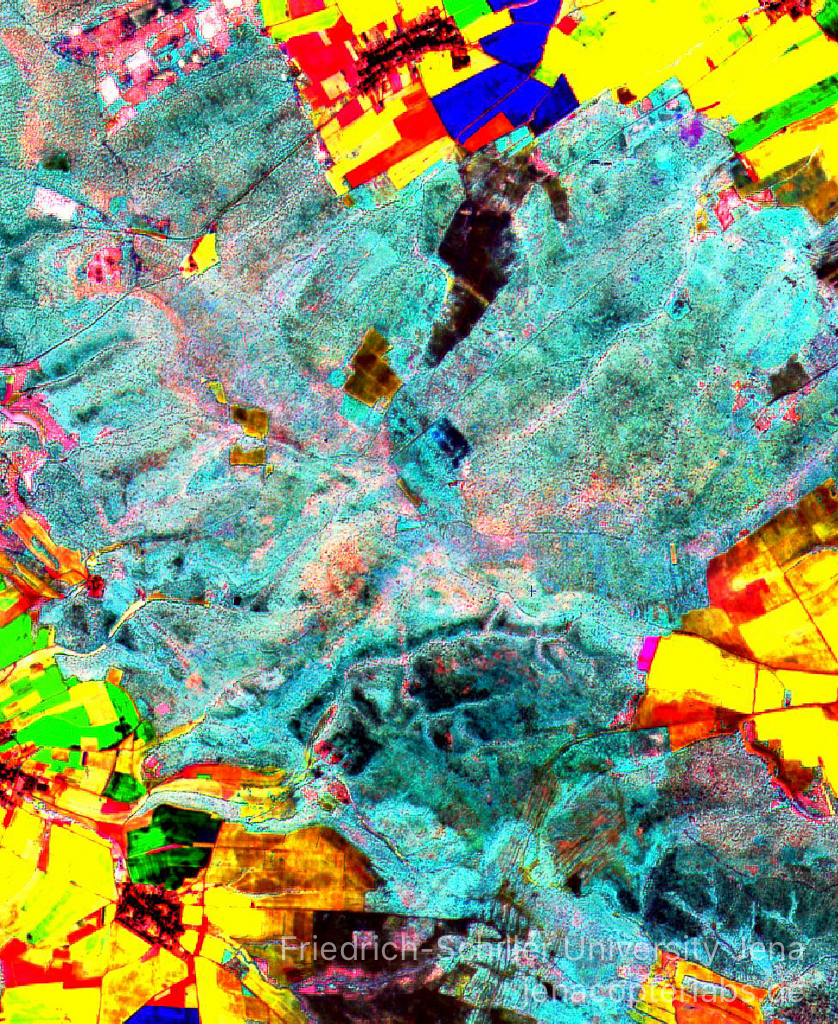
UPDATE: Flying for the Beech Trees II
Since July we have been very active covering the forest change in the Hainich National park region using the Phantom 4 Pro copter and the new Phantom 4 RTK (P4R). A project in cooperation with the Hainich national park administration, ThüringenForst and DLR Institute for Data Science Jena. First flights over 5 test areas were done already in July. We...