June 19, 2022
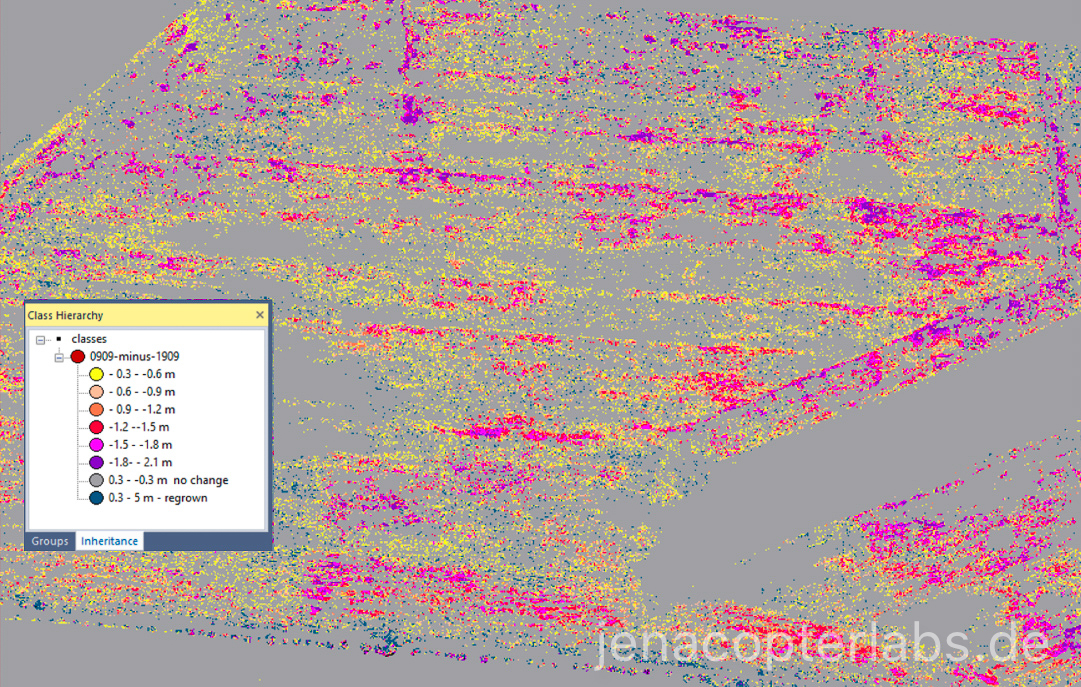
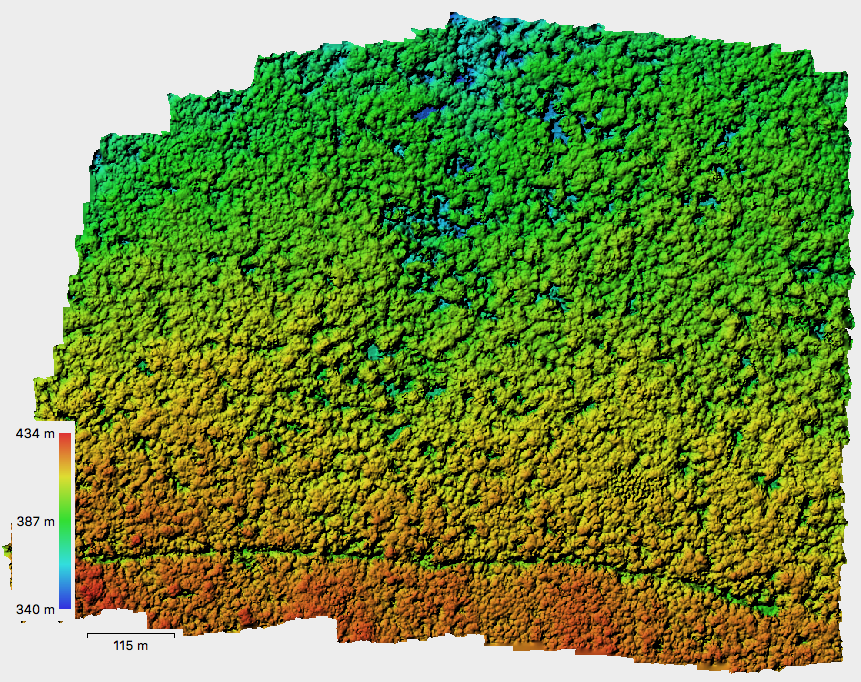
Oblique and cross-grid UAV imaging flight plans – a sneak preview of the analysis of resulting 3D point cloud properties for deciduous forest surfaces – low cost 3D mapping with the Phantom 4R (RTK)
Flight plans / photogrammetry / structure from motion / Metashape / oblique imaging / 3D point clouds / Lastools / Phantom 4R RTK / beech tree / deciduous trees / forest stand structure “Oblique and cross-grid UAV imaging flight plans – a sneak preview of the analysis of resulting 3D point cloud properties for deciduous forest surfaces” by Sören Hese....