Leaf-Off Flight Campaign in Park3D in`26

In march 2026, we began acquiring leaf-off data over all SPSG park areas in Potsdam as part of the Park3D project. This effort was primarily motivated by the improved potential for precise tree crown segmentation under leaf-off conditions.
A key challenge in deciduous tree crown segmentation is that it is often not possible to directly verify whether a segmented crown corresponds to an actual stem. Accurate stem detection is therefore essential for reliable crown delineation. Leaf-off data significantly improves the ability to identify stem positions and thus enhances segmentation accuracy. In addition, leaf-off datasets can be used to generate Quantitative Structure Models (QSMs), enabling new approaches to deciduous tree analysis—particularly for species differentiation and degradation assessment.
Data acquisition was carried out using the DJI M350 platform equipped with the L2 LiDAR sensor. Operating under the Specific category (STS-01), flights were conducted under very specific and restricting conditions:
- at an altitude of 114 m AGL (dipol calculation with altitude safety margin and ground risk buffer calculations),
- in VLOS conditions (approximately 500 m operational range (radius) for the M350 system),
- maximum speed of 5m/s,
- using an installed Cronos parachute auto trigger system with included kill switch for the M350,
- with ED-R 4 permission (restricted flight space in the south-west of Berlin),
- with extended security installations for landing pad area and
- flight time restricted to early morning flights at sunrise (6 AM) (before park opening).
Flight planning included 50/85% overlap in non-repetetive scan mode (70° by 75°) with penta-return at 240 kHz, resulting in point densities of at least 500 points/m².
Flight strip layout was primarily determined by VLOS constraints as well as Dipul contingency and ground risk buffer requirements. Low flight speed (5 m/s) was set to ensure high data quality (and meeting STS-01 requirements). For the Park3D project, all SPSG park restrictions were largely lifted, allowing efficient operations. A vehicle was used to reposition the M350 (kept in ready-to-fly condition) between launch sites within the park areas and with quick battery change. Data was acquired with real time RTK correction signal from SAPOS Potsdam (Telegrafenberg).
Leaf-off data sets were processed in DJI Terra to generate LAZ-format point clouds (100% density, with “optimize accuracy” and no smoothing). The point cloud files were then used to calculate canopy height models (CHMs) in both point cloud (LAZ) and raster formats, and deriving multiple height slices from BH(D) to top of canopy height.
The combined use of leaf-off and leaf-on datasets enables improved segmentation of deciduous trees and 3D tree point cloud objects. Current algorithm testing includes point-cloud–based segmentation in R (e.g., via lidR) as well as supervised U-Net–based segmentation with watershed crown delineation in heatmap layers and StarDist segmentation with star-convex shapes. Initial results indicate that integrating both seasonal datasets significantly improves segmentation accuracy and crown delineations suitable for cadastre updates.
Preliminary results from the leaf-off data shows a highly detailed representation of the inner canopy structure. However, substantial filtering was required to remove point cloud “fog” caused by very fine twigs and small branches in the outer canopy shell. The noise removal must be an integral aspect of leaf-off data processing. The DJI Zenmuse L2 is not representing fine twigs in the outer 1m circumference of the crown structure accurate enough. The result is a high degree of first-of-many-reflections that had to be carefully removed first. Basically this is also a consequence of the 4-5cm LiDAR shot diameter from roughly 80-90m relative altitude (114m AGL) and will be improved with the Zenmuse L3 system that we are testing in summer 26.
Some other very interesting research questions could possibly be addressed with these kind of datasets – some free moving ideas:
- how is point density changing with multi temporal acquisitions and can we describe phenology of different tree species – phenological LiDAR tracking?
- With precise structural tree crown description: can we model a competition Index from true 3D crown structure overlap?
- Can graph neural networks of the stem/branch system describe vitality differences based on leaf-off data?
- Full crown architecture from QSM for complete stands – branch angle, fractal dimension, scaling individual crown QSMs towards a full stand description computational possible?
- Crown asymmetric index from light competition detectable? Branch angle distribution analysis?
- 3D gap fraction analysis possible with combined leaf-off/leaf-on point cloud data?
- LiDAR & thermal – or LiDAR & hyperspectral fused measurements are promising concepts when structural data from QSM and per point measurements can be combined. Thermal data analysis is however usually only measured from a Nadir perspective (Altum-PT) and attribution to 3D point cloud measurements is not trivial … daily early morning vs afternoon delta of crown surface temperature related to crown structure and crown aspect/slope properties? etc ;-).
mtk Sören
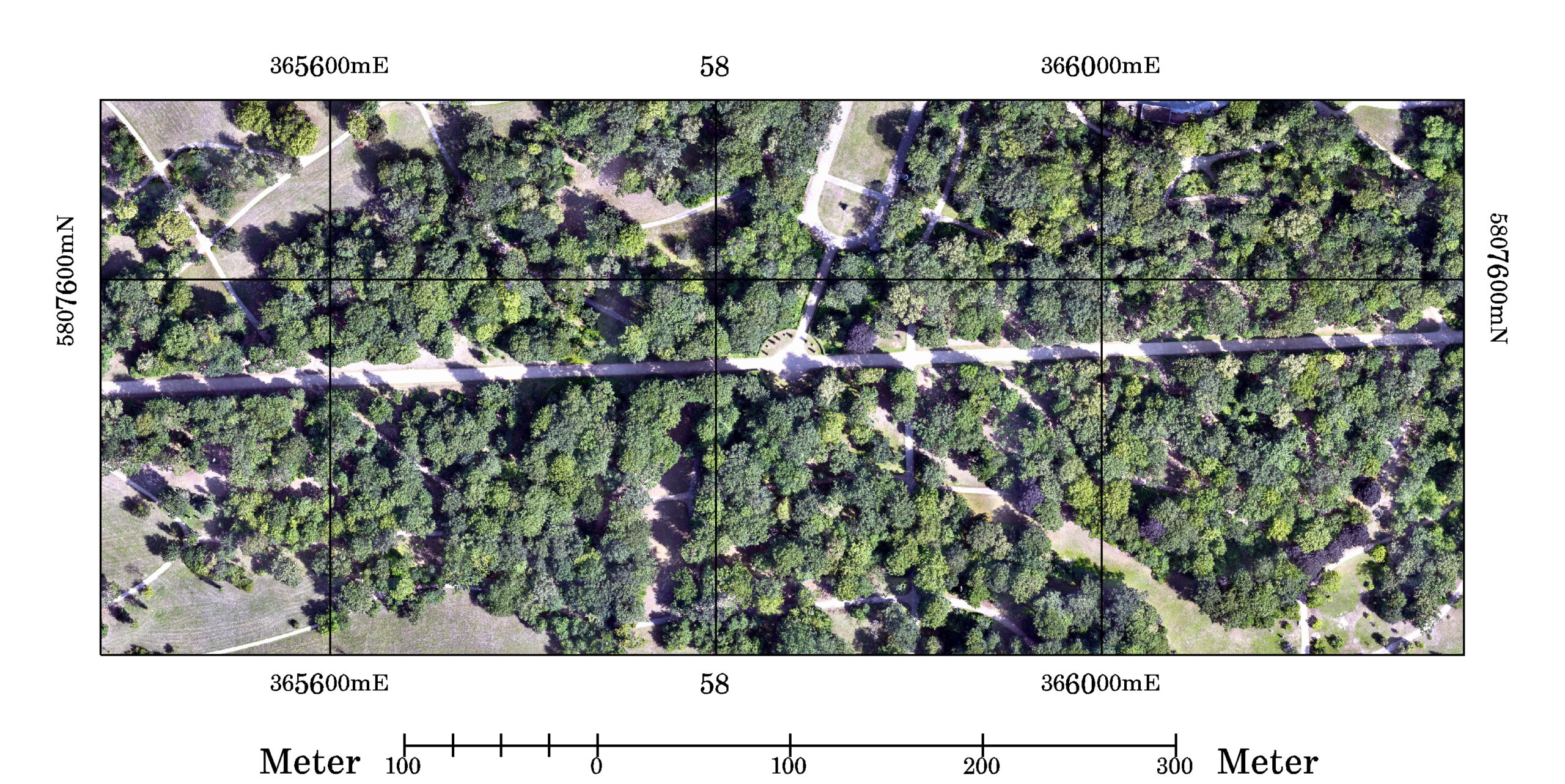
Fig.1: M3M RGB spectral True Ortho (TOP) mosaic subset from Park Sanssouci in June 2025, spatial resolution 10cm, WGS84 UTM33.
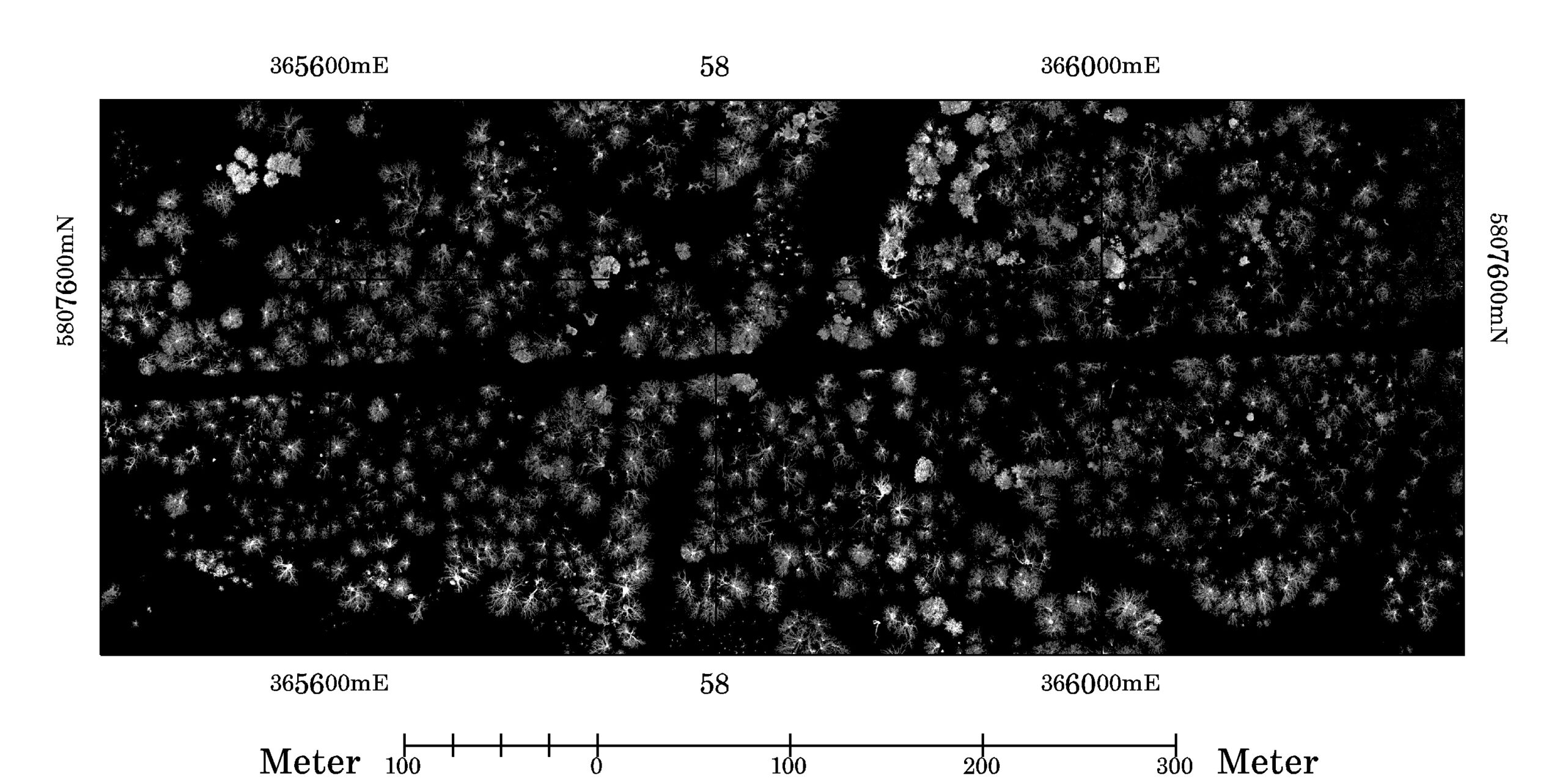
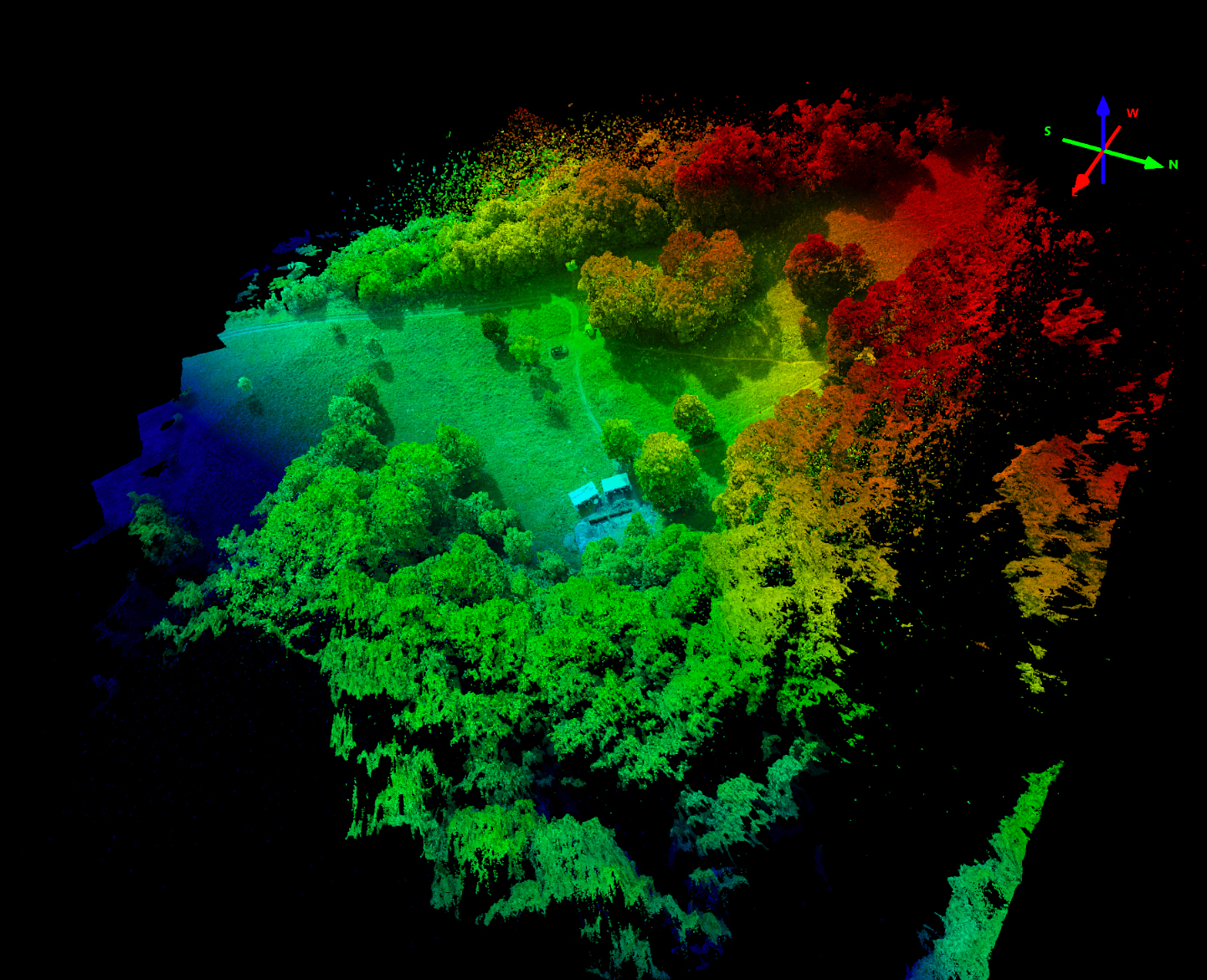
Fig.2: Leaf-Off L2 CHM point cloud based raster subset visualization (1.37 – 40m height), point density (number of points) in voxel space mapped to 20cm resolution voxels columns. WGS84 UTM33 projected, park Sanssouci in march 2026.
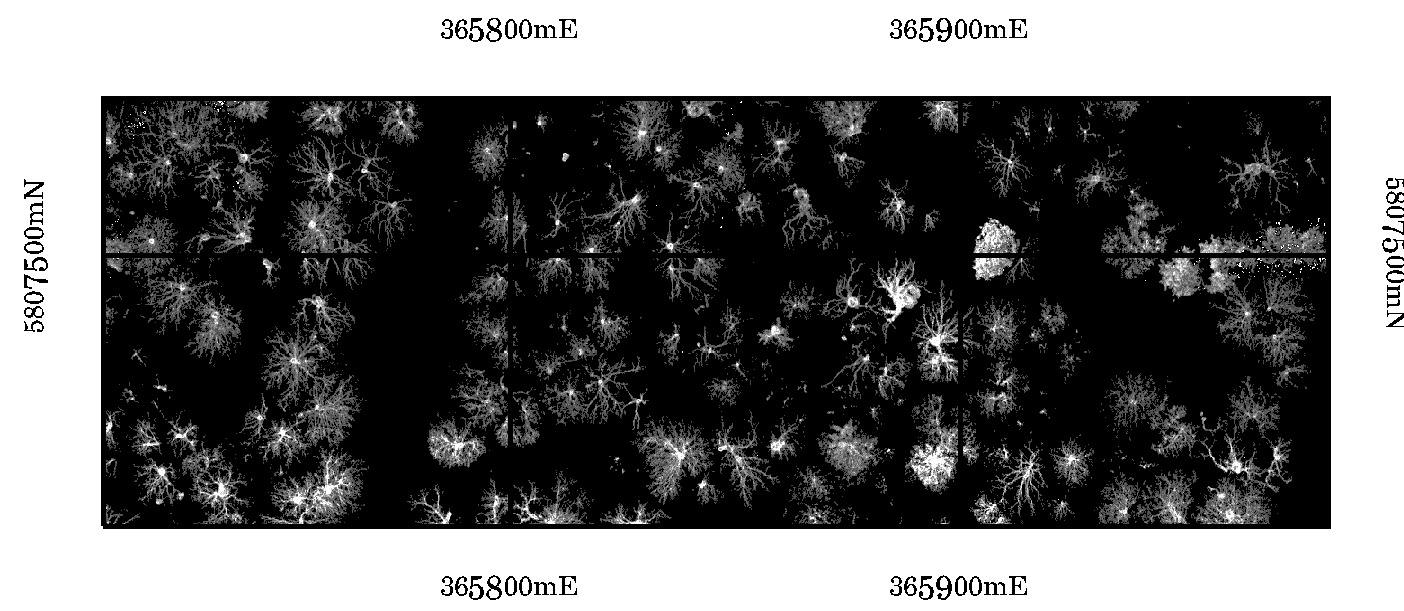
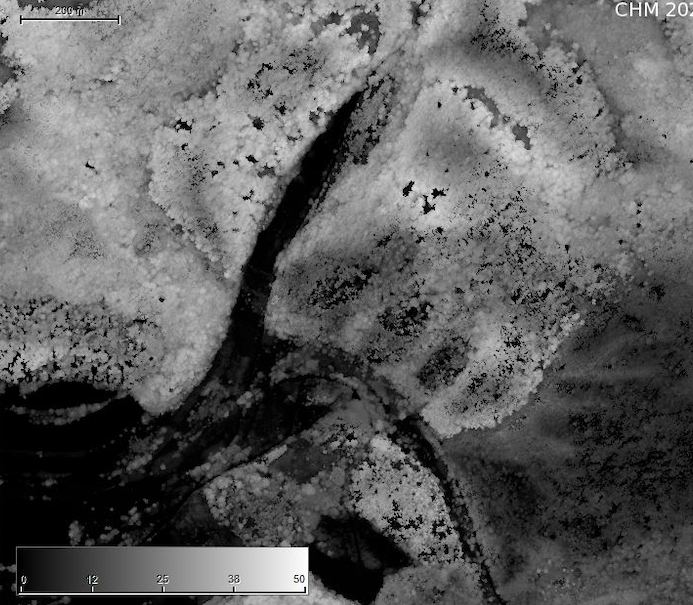
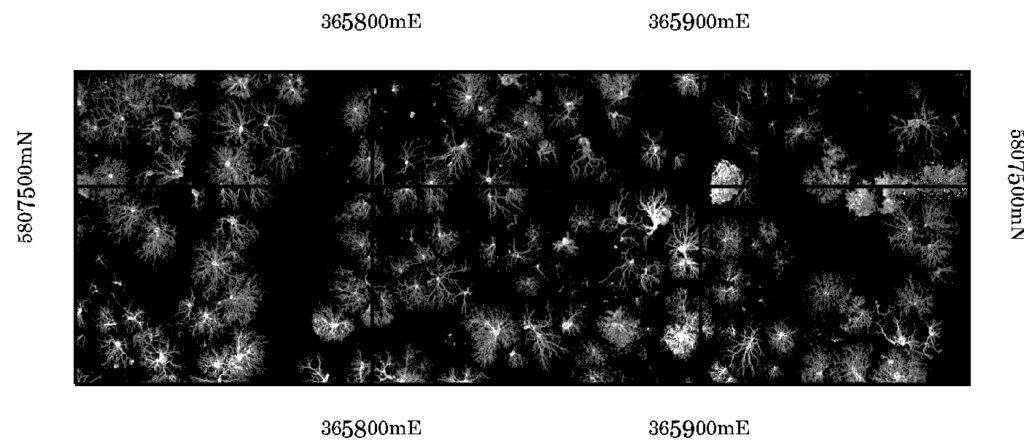
Fig.3: Subset from Fig 2. L2 Leaf-off CHM point cloud based raster subset visualization (1.37 – 40m height), point density in voxel space mapped to 20cm voxels columns. WGS84 UTM33 projected, Park Sanssouci in march 2026.
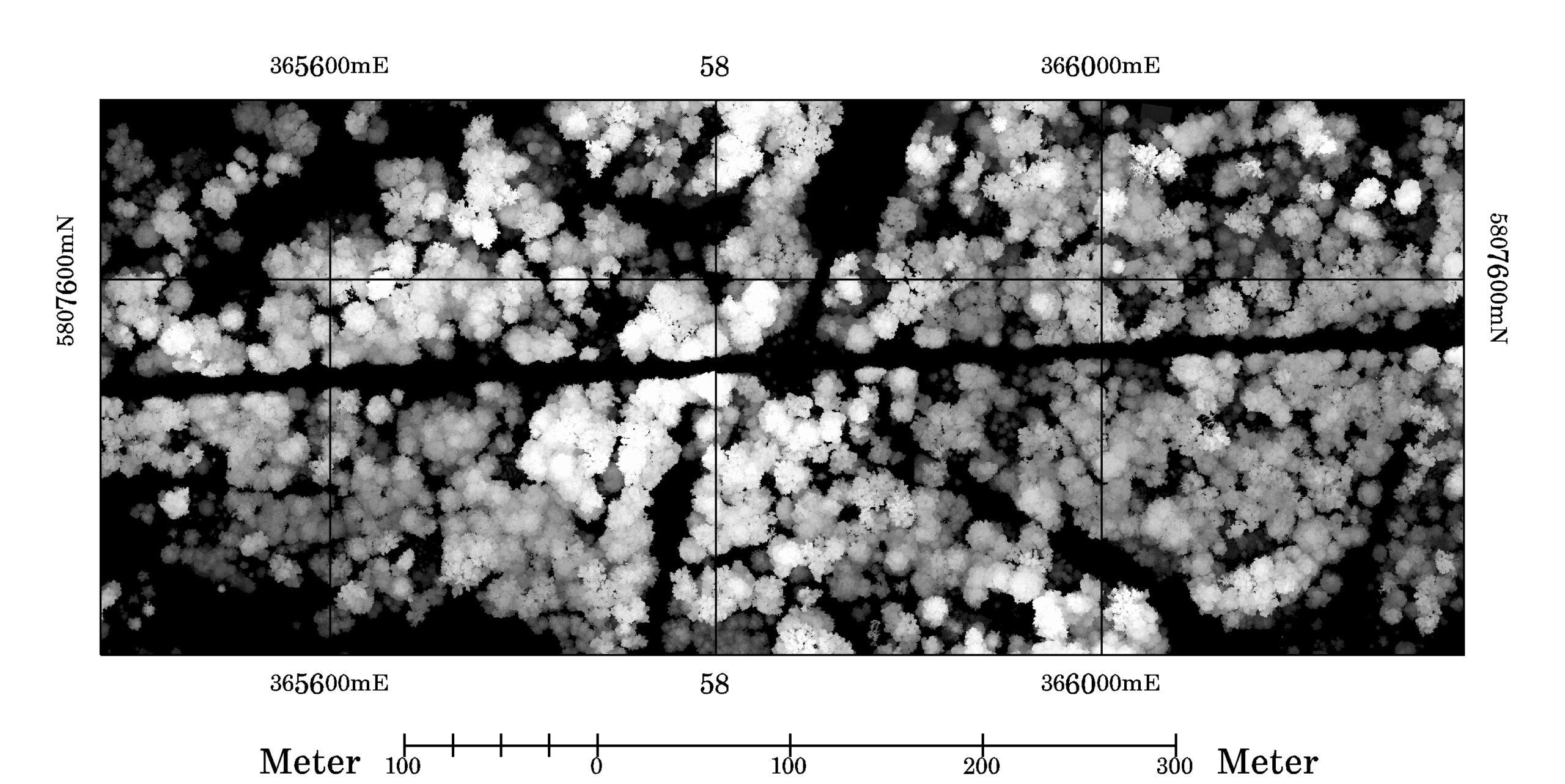
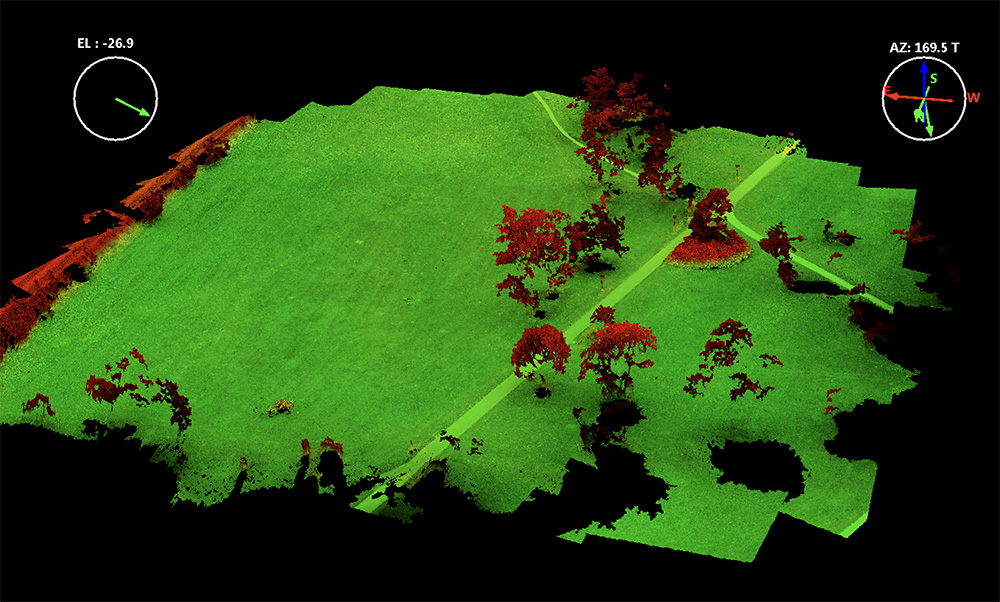
Fig.4: L2 point cloud based CHM subset raster visualization (Leaf-On CHM max height in 20cm voxels only), WGS84 UTM33 projected, Park Sanssouci in June 2025.